
-
-
wechat:同手机
-
-
Email:sales@gtktech.com
Contact Information
Official account of Wechat
GTK-R15 Aeronautical Geophysical Industry Solution
The optically pumped magnetometer is a magnetometer based on the Zeeman splits generated by helium and other gases and atoms of alkali metals such as potassium, rubidium, and cesium in the external magnetic field, and developed using optical pumping and magnetic resonance technology. The optically pumped magnetometer is the most accurate magnetometer among mature commercial general field magnetometers. In order to be suitable for drone flight,GTK-R07Rubidium optical pump aeromagnetic measurement systemA chip-level atomic optical pump magnetometer implemented using micro-electromechanical technology integrates a high-precision fluxgate three-component magnetometer,GPS, laser altimeter, 9-axis attitude sensor, barometric altimeter, use the industry's mature fixed-wing aeromagnetic compensation technology, real-time or post-flight compensation methods to eliminate the interference caused by the aircraft to the magnetometer probe during maneuvering flight using software compensation method. This system is currently the lightest vertical-fixed-wing drone optical pumping aeromagnetic compensation system known commercially.
TheAeromagnetic compensation system, from software communication to hardware integration,depthfusionInCW-15 flight platformMedium,It provides industry users with a one-stop solution for aeromagnetic aerial survey. Highly praised by industry experts.
Project | Parameters. |
Ground static noise level | 0.01 nT (fourth-order difference method, national standard aeromagnetic level 1) |
Resolution | 0.0001nT |
sensitivity | 0.02nT/√Hz (0.1-100 Hzfrequency band, power spectrum) |
measurement dead zone | Single declination plane,± 7 degrees |
Measuring range | 1000 nT - 100000 nT |
Power supply and power consumption | 5V, probe and frequency meter 2W (working), 3W (starting) |
Operating temperature | -30C to +60C |
Calibrating | not need |
maximum gradient tolerance | 1000 nT/cm |
Weight | 18 g (probe)/100g(frequency counter)(excluding connecting wire) |
Probe size | 19x19x47 mm (probe) |
Project | Parameters. |
number of flux gate axes | 3 (right-hand XYZ coordinate system) |
Measuring range | ±100μT |
Internal noise: low noise | At 1Hz,≈10pTrms/√Hz |
preheating time | 15 minutes |
offset error | ±100nT in zero field |
proportional error | DC, ±0.5% |
Temperature coefficient of offset error | 1nT/℃ |
quadrature error | The axial error is less than 1° |
Digital output static noise level | <0.2 nT 5Hz |
digital sampling rate | 10Hz-1Hz |
Micro multi-channel data collector | 24-bit high-speed ADC data collector, 4-core ARM Cortex-A53, 1.2 GHz CPU, USB data storage 12-parameter correction calculation corrects the fluxgate magnetometer for axial interference, scale coefficient, orthogonality error and soft-iron effect |
9-axis accelerometer gyroscope attitude angle measurement module/barometer Resolution: acceleration: 6.1e-5g, angular velocity:7.6e-3°/s. Stability: Acceleration: 0.01g, angular velocity 0.05°/s. Attitude measurement stability: 0.01° | |
GPS receiver 2m accuracy, supporting GPS and Beidou navigation satellites | |
aeromagneticground station system | Windows aeromagnetic data recording and processing software, post-flight data cleaning, data analysis,compensationparameter calculationfluxgate magnetometer12parameter numberCompensation algorithm and compensation technology for optically pumped magnetometer |
Parameters of CW-R15 vertical take-off and landing fixed-wing drone
drone characteristics | the parameters |
Maximum takeoff weight | 6.8Kg |
mission load | 0.8kg |
optimal cruising airspeed | 65km/h |
maximum airspeed | 105km/h |
Vertical take-off and landing power | Electrical Machinery |
Pingfei Power | Electrical Machinery |
battery life | 55min (equipped with aeromagnetic sensor) |
Wingspan | 2.2m |
Fuselage length | 1.3m |
practical ceiling | 6000m |
Maximum takeoff altitude | 4500m |
usage environment temperature | -30℃~50℃ |
Vertical positioning accuracy | 3cm |
Horizontal positioning accuracy | 1cm+1ppm |
take-off and landing mode | vertical take-off and landing |
rain-proof ability | Light rain and light snow (rainfall ≤10mm/24h) |
wind resistance | 6 winds |
control distance | 30km |
Packaging box size | 1200×500×400mm |
System adopts18 coefficient compensation algorithms use software compensation methods to compensate aeromagnetic data. The system uses the three components of the vector magnetometer as attitude factors to remove the permanent magnetic field, induced magnetic field and eddy current magnetic field of the aircraft from the total field through algorithms.
In a gentle magnetic field area as far away as possible from the ground, based on data from previous four-sided flights, it is estimated that18 coefficients. During subsequent actual work survey flights, the collected data was processed using 18 memory term coefficients.
Interference improvement ratio (Total field): 10-20 times (typical value, the results vary for different flight platforms. The less interference the system, the lower the improvement rate)
Fluxgate magnetometerThe 12-parameter digital compensation algorithm obtains 12 correction parameters for axial interference, scale coefficient, orthogonality error and software effects, which can compensate the total field output by the fluxgate magnetometer in real time.
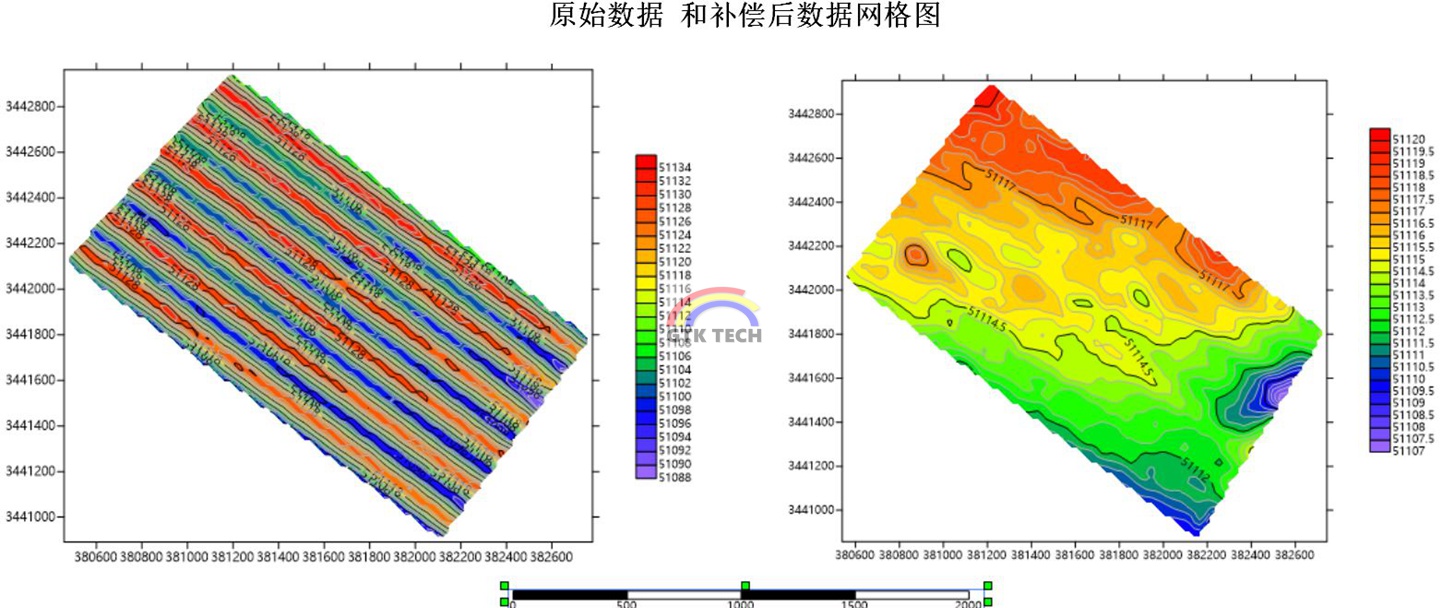
Raw data Comparison with the compensated data grid diagram
GTK-R15 Aeronautical Geophysical Industry Solution
The optically pumped magnetometer is a magnetometer based on the Zeeman splits generated by helium and other gases and atoms of alkali metals such as potassium, rubidium, and cesium in the external magnetic field, and developed using optical pumping and magnetic resonance technology. The optically pumped magnetometer is the most accurate magnetometer among mature commercial general field magnetometers. In order to be suitable for drone flight,GTK-R07Rubidium optical pump aeromagnetic measurement systemA chip-level atomic optical pump magnetometer implemented using micro-electromechanical technology integrates a high-precision fluxgate three-component magnetometer,GPS, laser altimeter, 9-axis attitude sensor, barometric altimeter, use the industry's mature fixed-wing aeromagnetic compensation technology, real-time or post-flight compensation methods to eliminate the interference caused by the aircraft to the magnetometer probe during maneuvering flight using software compensation method. This system is currently the lightest vertical-fixed-wing drone optical pumping aeromagnetic compensation system known commercially.
TheAeromagnetic compensation system, from software communication to hardware integration,depthfusionInCW-15 flight platformMedium,It provides industry users with a one-stop solution for aeromagnetic aerial survey. Highly praised by industry experts.
Project | Parameters. |
Ground static noise level | 0.01 nT (fourth-order difference method, national standard aeromagnetic level 1) |
Resolution | 0.0001nT |
sensitivity | 0.02nT/√Hz (0.1-100 Hzfrequency band, power spectrum) |
measurement dead zone | Single declination plane,± 7 degrees |
Measuring range | 1000 nT - 100000 nT |
Power supply and power consumption | 5V, probe and frequency meter 2W (working), 3W (starting) |
Operating temperature | -30C to +60C |
Calibrating | not need |
maximum gradient tolerance | 1000 nT/cm |
Weight | 18 g (probe)/100g(frequency counter)(excluding connecting wire) |
Probe size | 19x19x47 mm (probe) |
Project | Parameters. |
number of flux gate axes | 3 (right-hand XYZ coordinate system) |
Measuring range | ±100μT |
Internal noise: low noise | At 1Hz,≈10pTrms/√Hz |
preheating time | 15 minutes |
offset error | ±100nT in zero field |
proportional error | DC, ±0.5% |
Temperature coefficient of offset error | 1nT/℃ |
quadrature error | The axial error is less than 1° |
Digital output static noise level | <0.2 nT 5Hz |
digital sampling rate | 10Hz-1Hz |
Micro multi-channel data collector | 24-bit high-speed ADC data collector, 4-core ARM Cortex-A53, 1.2 GHz CPU, USB data storage 12-parameter correction calculation corrects the fluxgate magnetometer for axial interference, scale coefficient, orthogonality error and soft-iron effect |
9-axis accelerometer gyroscope attitude angle measurement module/barometer Resolution: acceleration: 6.1e-5g, angular velocity:7.6e-3°/s. Stability: Acceleration: 0.01g, angular velocity 0.05°/s. Attitude measurement stability: 0.01° | |
GPS receiver 2m accuracy, supporting GPS and Beidou navigation satellites | |
aeromagneticground station system | Windows aeromagnetic data recording and processing software, post-flight data cleaning, data analysis,compensationparameter calculationfluxgate magnetometer12parameter numberCompensation algorithm and compensation technology for optically pumped magnetometer |
Parameters of CW-R15 vertical take-off and landing fixed-wing drone
drone characteristics | the parameters |
Maximum takeoff weight | 6.8Kg |
mission load | 0.8kg |
optimal cruising airspeed | 65km/h |
maximum airspeed | 105km/h |
Vertical take-off and landing power | Electrical Machinery |
Pingfei Power | Electrical Machinery |
battery life | 55min (equipped with aeromagnetic sensor) |
Wingspan | 2.2m |
Fuselage length | 1.3m |
practical ceiling | 6000m |
Maximum takeoff altitude | 4500m |
usage environment temperature | -30℃~50℃ |
Vertical positioning accuracy | 3cm |
Horizontal positioning accuracy | 1cm+1ppm |
take-off and landing mode | vertical take-off and landing |
rain-proof ability | Light rain and light snow (rainfall ≤10mm/24h) |
wind resistance | 6 winds |
control distance | 30km |
Packaging box size | 1200×500×400mm |
System adopts18 coefficient compensation algorithms use software compensation methods to compensate aeromagnetic data. The system uses the three components of the vector magnetometer as attitude factors to remove the permanent magnetic field, induced magnetic field and eddy current magnetic field of the aircraft from the total field through algorithms.
In a gentle magnetic field area as far away as possible from the ground, based on data from previous four-sided flights, it is estimated that18 coefficients. During subsequent actual work survey flights, the collected data was processed using 18 memory term coefficients.
Interference improvement ratio (Total field): 10-20 times (typical value, the results vary for different flight platforms. The less interference the system, the lower the improvement rate)
Fluxgate magnetometerThe 12-parameter digital compensation algorithm obtains 12 correction parameters for axial interference, scale coefficient, orthogonality error and software effects, which can compensate the total field output by the fluxgate magnetometer in real time.
Raw data Comparison with the compensated data grid diagram





